
محصولات
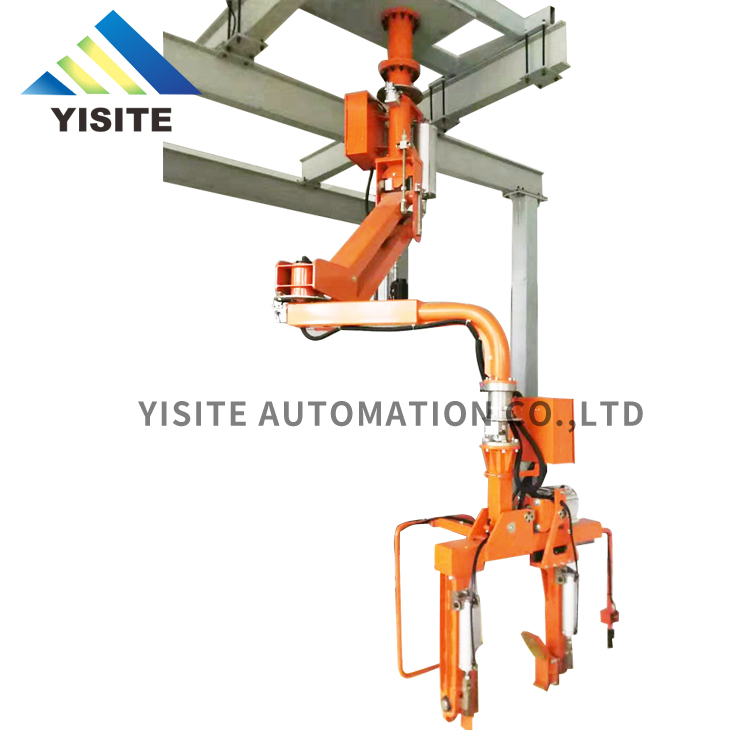


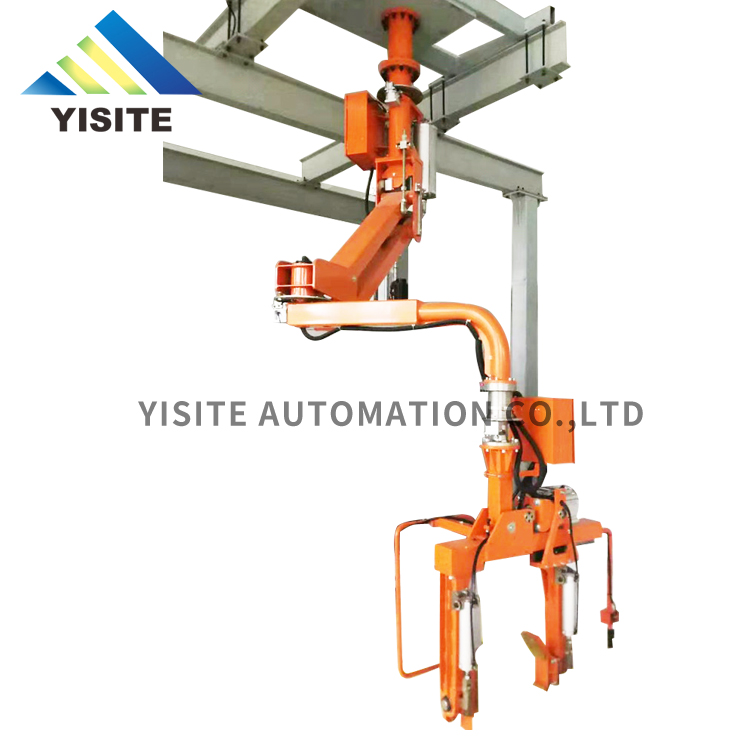
دستکاری جرثقیل تعلیق
توضیحات کوتاه:
دستکاری کننده تقویت کننده تعلیق از پایه نصب، میله بازوی فولادی و پایه تشکیل شده است. بازوی اصلی را می توان 360 درجه چرخاند، میله بازوی دوم را می توان 270 درجه برای دستیابی به محدوده کاری پوشش داد و چرخش می تواند اضافه کند. مکانیزم ترمز. برای جابجایی با فرکانس بالا، موقعیت یابی، مونتاژ قطعات و موارد دیگر مناسب است.



در مورد ما

ما یک تولید کننده حرفه ای تجهیزات اتوماسیون سفارشی هستیم. محصولات ما شامل پاک کننده، دستگاه بسته بندی انتخاب و مکان، پالت ساز، برنامه یکپارچه سازی ربات، دستکاری کننده های بارگیری و تخلیه، شکل دهی کارتن، آب بندی کارتن، پخش کننده پالت، دستگاه بسته بندی و سایر راه حل های اتوماسیون برای خط تولید بسته بندی پشتی است.
مساحت کارخانه ما حدود 3500 متر مربع است. تیم فنی اصلی دارای میانگین 5-10 سال تجربه در اتوماسیون مکانیک است که شامل 2 مهندس طراحی مکانیک می شود. 1 مهندس برنامه نویس، 8 کارگر مونتاژ، 4 نفر عیب یابی پس از فروش و 10 کارگر دیگر
اصل ما "اول مشتری، اول کیفیت، اول شهرت" است، ما همیشه به مشتریان خود کمک می کنیم "ظرفیت تولید را افزایش دهند، هزینه ها را کاهش دهند و کیفیت را بهبود بخشند" ما در تلاش هستیم تا به یک تامین کننده برتر در صنعت اتوماسیون ماشین آلات تبدیل شویم.
ویژگی های محصول
با تشخیص مکنده یا انتهای مانیپولاتور و متعادل کردن فشار گاز در سیلندر، می تواند به طور خودکار بار روی بازوی مکانیکی را شناسایی کند و به طور خودکار فشار هوا را در سیلندر از طریق مدار کنترل منطق پنوماتیک تنظیم کند تا به نتیجه برسد. هدف از تعادل خودکار. هنگامی که کار می کند، اجسام سنگین مانند معلق بودن در هوا هستند، که می تواند از برخورد اتصال محصول جلوگیری کند. در محدوده کاری بازوی مکانیکی، اپراتور می تواند به راحتی آن را به عقب، به سمت چپ و پایین به سمت هر مکانی حرکت دهد. موقعیت، و خود شخص می تواند به راحتی کار کند. در عین حال، مدار پنوماتیک همچنین دارای عملکردهای حفاظتی زنجیره ای مانند جلوگیری از از دست دادن تصادفی جسم و محافظت از کاهش فشار است.

اصل کار و حالت دستکاری کننده قدرت تعلیق:
با تشخیص مکنده یا انتهای مانیپولاتور و متعادل کردن فشار گاز در سیلندر، می تواند به طور خودکار بار روی بازوی مکانیکی را شناسایی کند و به طور خودکار فشار هوا را در سیلندر از طریق مدار کنترل منطق پنوماتیک تنظیم کند تا به نتیجه برسد. هدف از تعادل خودکار. هنگام کار، اجسام سنگین مانند معلق بودن در هوا هستند که می تواند از برخورد اتصال محصول جلوگیری کند. در محدوده کاری بازوی مکانیکی، اپراتور می تواند به راحتی آن را به سمت عقب، چپ و پایین به هر موقعیتی حرکت دهد. ، و خود شخص می تواند به راحتی کار کند. در عین حال، مدار پنوماتیک دارای عملکردهای حفاظتی زنجیره ای مانند جلوگیری از از دست دادن تصادفی جسم و محافظت از کاهش فشار است.
ویژگی ها
حداکثر بار. 900 کیلوگرم
حداکثر شعاع اکشن: 4500 میلی متر
سفر عمودی: 0.5 متر در دقیقه
سیستم کنترل: 2200 میلی متر
سیستم کنترل: هوا کاملا پنوماتیک
عرضه کنید: هوای فشرده (40 میکرومتر) بدون چربی
فشار کاری: 0.7 ÷ 0.8 Mpa
دمای کاری: +0 درجه تا +45 درجه سانتی گراد
نویز:مصرف هوا: 100 نیوتن لیتر ÷ 400 نیوتن در هر چرخه
چرخش: شفت ستون و محور ثابت 360 درجه چرخش مداوم، شفت میانی 300 درجه چرخش مداوم







